Abitia-Gonzalez, A. et al. RSCTyH, VOL. I, No.01, Enero 2023
Artículo de
Investigación
Resumen: El desarrollo de librerías en el área de robótica ha sido una tarea de interés debido a la cantidad de datos y operaciones matemáticas requeridas, a lo largo de los años se han desarrollado librerías en ambientes como C++, Java, MATLAB ® y más recientemente en Python. Los enfoques de desarrollo incluyen navegación autónoma, visión, simulación del comportamiento cinemático y/o dinámico, planificación de trayectorias entre otras. Se propone una librería en ambiente Python que proporciona herramientas para generar el modelo cinemático directo e inverso, generar trayectorias en espacio articular y cartesiano mediante interpolación lineal y finalmente simular las trayectorias en un ambiente gráfico tridimensional.
Palabras clave: Python, Humanoide, Modelo Cinemático. |
Abstract: Development of libraries in the robotics area has been a task of interest due to the amount of data and mathematical operations required, over the years libraries have been developed in environments such as C++, Java, MATLAB® and more recently in Python. Approaches include autonomous navigation, computer vision, simulation of kinematic and/or dynamic behavior, trajectory planning among others. A library in Python environment is proposed, provides tools to generate direct and inverse kinematic model, trajectories by lineal interpolation in joint and cartesian space and finally simulate the trajectories in a three-dimensional graphic environment. Keywords: Python, Humanoid, Kinematics model |
Recibido:20/10/22; Aceptado: 12/12/2022; Publicado 25/01/2023
Introducción
A lo largo de los años se han desarrollado algunas librerías o paquetes para su uso en aplicaciones de modelado cinemático y dinámico en robótica desde enfoques de aplicación diversos. La librería Robotics Toolbox for MATLAB® [1], fue creada en el año 1991 y publicada en 1995, durante 25 años se ha actualizado a la par de las versiones de MATLAB®. El libro Robótica del autor John Craig [2] hace uso de esta librería en sus ejercicios. Aunque la librería es de código abierto, es necesario contar con MATLAB® para poder hacer uso de ella. En el ambiente Python las librerías PythonRobotics [3] y Klampt [4] se enfocan en navegación autónoma y planificación, iDynTree [5], Siconos [6] , PyDy [7] , DART [8], and PyBullet [9] proporcionan herramientas para evaluar el comportamiento dinámico; Pybullet y DART combinan C++ y Python para proporcionar ambientes gráficos de simulación dinámica. Pybotics [10] se concentra en las cadenas cinemáticas pero solo usa la notación de Denavit y Hartenberg modificada [11]. Python-robotics [12], [13] contiene algunas funciones de robótica. El análisis cinemático y dinámico de un robot humanoide implica el análisis de cuatro o más cadenas cinemáticas abiertas con un marco base móvil común para las cuatro cadenas. Por lo que se propone una librería en ambiente Python para el manejo del modelo cinemático del robot en conjunto, tal librería se enfoca en generar el modelo cinemático, directo e inverso, de robots humanoides, generar trayectorias y mostrar los resultados en un ambiente gráfico. Aunque la librería fue diseñada para trabajar con robots humanoides, por la forma en que se estructuró, es posible utilizarla en robots manipuladores de cadena cinemática abierta.
Materiales y Métodos
Se utilizó el ambiente Python debido a que es un lenguaje abierto y cuenta con recursos que brindan portabilidad, gráficos rápidos tridimensionales, operaciones numéricas y simbólicas rápidas, interfaces de usuario, entre otros. El código se implementó en Python 3.6, usa los paquetes de Numpy para el manejo de arreglos y PyYaml para la serialización de datos que corresponden a la configuración del robot. La figura 1 muestra la estructura general de la librería propuesta.
Figura 1. Estructura general de la Librería Propuesta.
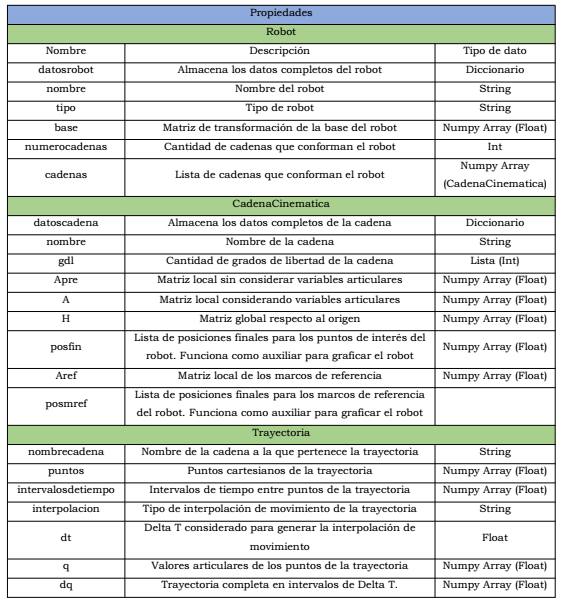
La librería consta de tres clases (robot, cadenaCinemática y Trayectoria) y de una colección de funciones que permiten crear y manipular un robot, en la Tabla 1 se muestran las propiedades de cada una de las clases, mientras que en la Tabla 2 se presentan los métodos y en la Tabla 3 las funciones estáticas. En la clase robot se indica el nombre y tipo de robot, su posición y orientación en el espacio, mediante matriz homogénea del marco base (definida por la ecuación 1) así como la cantidad de cadenas cinemáticas abiertas que conforman al robot humanoide, se describe cada cadena cinemática mediante objetos de la clase CadenaCinemática.
Tabla 1. Propiedades de las clases de la Librería Propuesta
Tabla 2. Métodos de la librería propuesta
Tabla 3. Funciones Estáticas
(1)
Por ejemplo, un robot humanoide tiene una cadena cinemática para cada pierna y para cada brazo, cuatro en total, y algunos robots cuenta con actuadores en el torso y/o cabeza incrementando el número de cadenas. Para el caso de estudio del Robot Humanoide Bioloid PremiumTM mostrado en la figura 2, el robot cuenta con 18 grados de libertad distribuidos en cuatro cadenas cinemáticas mostradas en la Figura 3.
Figura 2. Robot Humanoide Bioloid PremiumTM
Figura 3. Cadenas Cinemáticas y articulaciones del robot Humanoide Bioloid PremiumTM
En la clase cadena Cinemática se indica el nombre asociado a la cadena, el número de grados de libertad, las matrices homogéneas locales y globales, así como las posiciones del final de cada eslabón. En cuanto a los métodos de la cadena cinemática se propone crear las matrices locales a partir de los parámetros Denavit Hartenberg con el método calcularlocales; dichos parámetros se obtienen mediante la función extraedatos a partir de un archivo descriptivo del robot en formato YML usando el paquete de Python PyYAML. Los parámetros Denavit Hartenberg son: a, d, α y θ para cada articulación, siguiendo la metodología DenaVit Hartenberg [14] se calculan las matrices locales mediante la ecuación 2, posteriormente se calculan las matrices globales con el método cinemática directa, de acuerdo a la ecuación 3, o bien se calculan las variables articulares a partir de posiciones deseadas mediante el método de cinemática inversa [15]; se presentan también los métodos para extraer la información de posición del final de cada eslabón de las matrices globales mediante obtenerposiciones los cuales corresponden a los primeros tres renglones de la cuarta columna de las matrices globales.
(2)
 (3)
(3)
En la clase Trayectorias las propiedades indican el nombre de la cadena para la trayectoria, los puntos en el espacio cartesiano y en el espacio articular para generar la trayectoria, el incremento de tiempo entre los puntos a generar, el tipo de interpolación a utilizar y el incremento de tiempo. El método crearvalores articulares extrae información de las posiciones articulares que se obtuvieron por el método de cinemáticainversa de la clase cadena cinemática a partir de puntos deseados en el espacio cartesiano, tales posiciones articulares y el tipo de interpolación seleccionado se usan por el método creartrayectoria para proporcionar un historial de posiciones.
Resultados y Discusión
Se analizó el caso del robot humanoide Bioloid PremiumTM de 18 grados de libertad distribuidos en cuatro cadenas que se muestran en la figura 4, se calcularon las matrices locales y globales y se grafican las posiciones de cada articulación de las cuatro cadenas cinemáticas desde el marco base del robot. Se generaron trayectorias mediante interpolación lineal para el brazo derecho con posiciones deseadas en [0,100,50] y [0, -100, 50], mostrando gráficamente las trayectorias de cada posición articular en la figura 5.
Conclusiones
La librería se diseñó originalmente con el objetivo de proveer, al robot Bioloid PremiumTM, las herramientas necesarias para facilitar y simplificar el cálculo de su cinemática directa e inversa, la generación de trayectorias de movimiento y preparar los datos que serían enviados al entorno de simulación. No obstante, por su manera de procesar los datos, se consiguió que la librería puede ser utilizada para simular cualquier tipo de robot que cuente con cadenas cinemáticas abiertas en su estructura. Como trabajo futuro se pretende implementar más algoritmos para la generación de trayectorias, incluir la simulación dinámica mediante PyBullet y las propiedades dinámicas del robot y finalmente agregar los archivos CAD del robot para que se observen en el gráfico del simulador.
Figura 4. Gráfica del robot BIOLOID en su posición inicial
Figura 5. Gráfica de algunas posturas del robot durante la trayectoria calculada.
Conflicto de Intereses
Los autores expresan que no existen conflictos de interés al redactar el manuscrito.
Referencias
[1] P. I. Corke, «A robotics toolbox for MATLAB», IEEE Robot. Autom. Mag., vol. 3, n.o 1, pp. 24-32, mar. 1996, doi: 10.1109/100.486658.
[2] J. J. Craig, Robótica, 3. ed. Mexico: Pearson educacion, 2006.
[3] A. Sakai, D. Ingram, J. Dinius, K. Chawla, A. Raffin, y A. Paques, «PythonRobotics: a Python code collection of robotics algorithms», 2018.
[4] K. Hauser, «klamp’t. (Kris’ Locomotion and Manipulation Planning Toolbox)». 2022. [En línea]. Disponible en: https://github.com/krishauser/Klampt
[5] F. Nori, S. Traversaro, J. Eljaik, F. Romano, A. Del Prete, y D. Pucci, «iCub Whole-Body Control through Force Regulation on Rigid Non-Coplanar Contacts», Front. Robot. AI, vol. 2, mar. 2015, doi: 10.3389/frobt.2015.00006.
[6] V. Acary, O. Huber, y M. Shpakovych, «Simulation framework for nonsmooth dynamical systems». 2022. [En línea]. Disponible en: https://github.com/siconos/siconos
[7] G. Gede, D. L. Peterson, A. S. Nanjangud, J. K. Moore, y M. Hubbard, «Constrained Multibody Dynamics With Python: From Symbolic Equation Generation to Publication», en Volume 7B: 9th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, Portland, Oregon, USA, ago. 2013, p. V07BT10A051. doi: 10.1115/DETC2013-13470.
[8] J. Lee et al., «DART: Dynamic Animation and Robotics Toolkit», J. Open Source Softw., vol. 3, n.o 22, p. 500, feb. 2018, doi: 10.21105/joss.00500.
[9] E. Coumans y Y. Bai, «PyBullet, a Python module for physics simulation for games, robotics and machine learning». 2022. [En línea]. Disponible en: https://pybullet.org/
[10] N. Nadeau, «Pybotics: Python Toolbox for Robotics», J. Open Source Softw., vol. 4, n.o 41, p. 1738, sep. 2019, doi: 10.21105/joss.01738.
[11] M. Granja, N. Chang, V. Granja, M. Duque, y F. Llulluna, «Comparison between Standard and Modified Denavit-Hartenberg Methods in Robotics Modelling», presentado en The 2nd World Congress on Mechanical, Chemical, and Material Engineering, jul. 2016. doi: 10.11159/icmie16.118.
[12] R. Fraanje, T. Koreneef, A. Le Mair, y S. de Jong, «Python in robotics and mechatronics education», en 2016 11th France-Japan & 9th Europe-Asia Congress on Mechatronics (MECATRONICS) /17th International Conference on Research and Education in Mechatronics (REM), Compiègne, France, jun. 2016, pp. 014-019. doi: 10.1109/MECATRONICS.2016.7547108.
[13] R. Fraanje, «Robot kinematics with python-visual visualization». 2022. [En línea]. Disponible en: https://github.com/prfraanje/python-robotics
[14] M. W. Spong, S. Hutchinson, y M. Vidyasagar, Robot Modeling and Control, 1st ed. Wiley, 2005.
[15] J. V. Nunez, A. Briseno, D. A. Rodriguez, J. M. Ibarra, y V. M. Rodriguez, «Explicit Analytic Solution for Inverse Kinematics of Bioloid Humanoid Robot», en 2012 Brazilian Robotics Symposium and Latin American Robotics Symposium, Fortaleza, Brazil, oct. 2012, pp. 33-38. doi: 10.1109/SBR-LARS.2012.62.